Collaborative robots in manufacturing sound great on paper: a human and a robot sharing a workspace, each doing what they do best. In practice, the hard part isn’t necessarily the robot. It’s the human trying to figure out when the robot needs them.
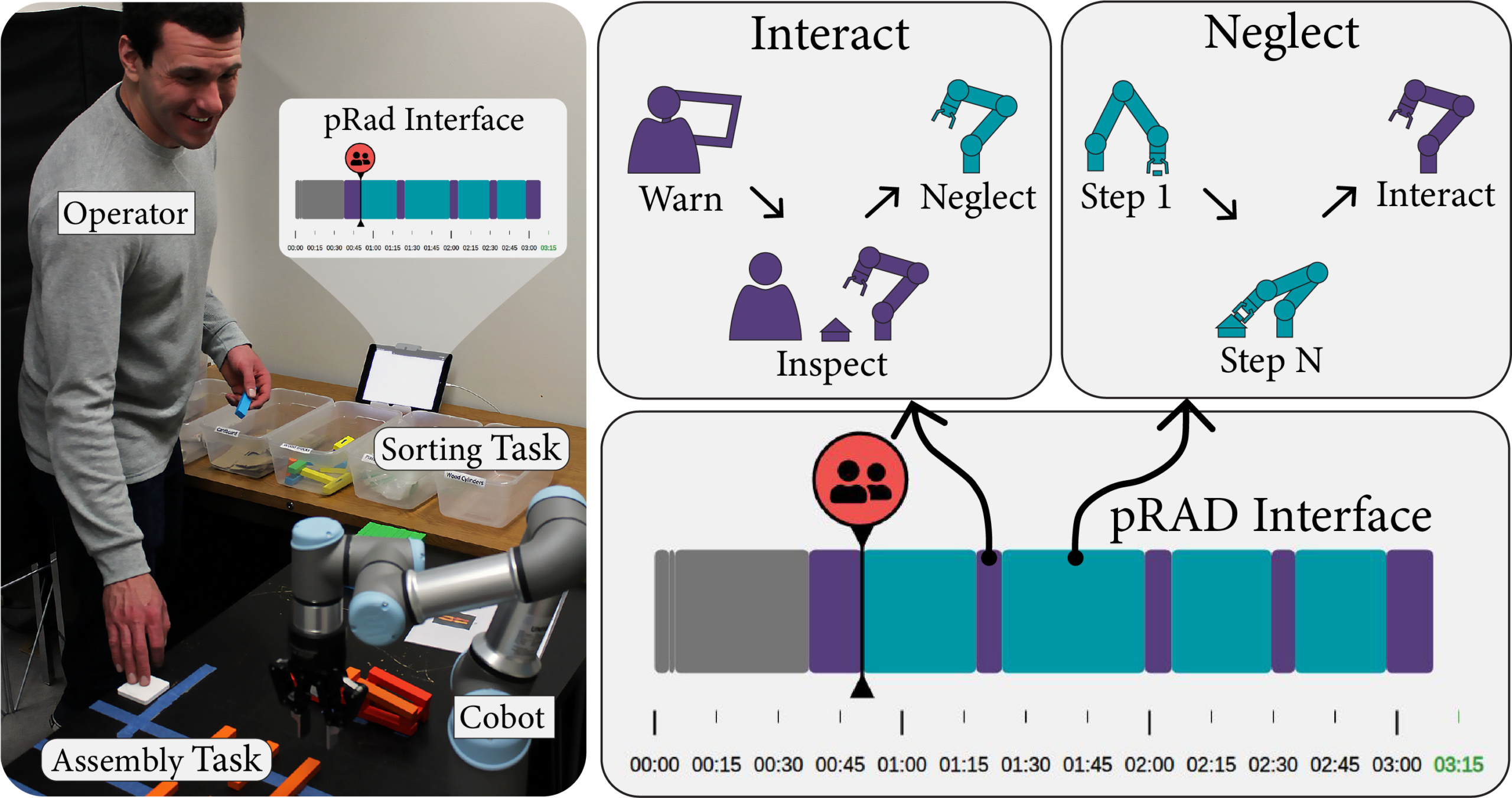
During my time at the People and Robots Laboratory at UW-Madison, I worked on this exact problem. We developed pRAD (Predictive Robot Attention Demand), a metric and interface system that tells operators when a cobot will need their attention and for how long. The core idea is simple: if the robot’s task can be broken into autonomous segments (neglect time) and segments requiring human input (interaction time), we can predict and visualize the full schedule up front.
We built two interface prototypes: a timeline showing the entire task sequence and a countdown timer with traffic-light color coding (green, yellow, red). We then ran a 34-participant study comparing them against a no-interface baseline. The timeline interface significantly reduced perceived task load; both interfaces scored higher on usability; and participants reported better ability to manage their attention across concurrent tasks.
The work was published at IEEE RO-MAN 2020 and IEEE RO-MAN 2021.
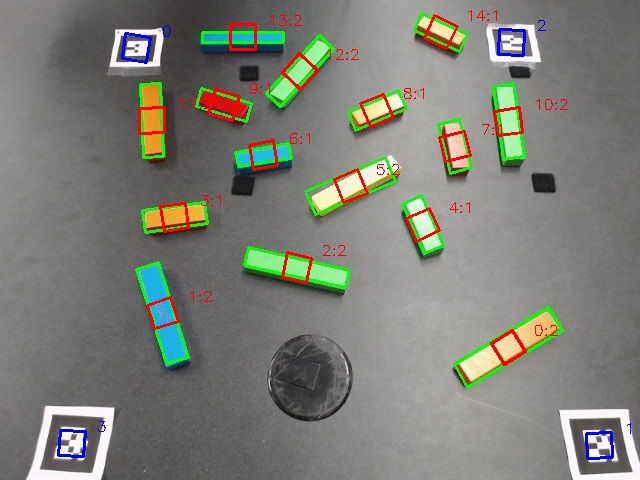
The ROS-based implementation ran on a UR3e cobot with a Robotiq gripper performing a toy house assembly task while participants juggled a secondary sorting task during the robot’s autonomous phases.
Papers:
- Zhao, F., Henrichs, C., & Mutlu, B. (2020, August). Task interdependence in human-robot teaming. In 2020 29th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN) (pp. 1143-1149). IEEE.
- Henrichs, C., Zhao, F., & Mutlu, B. (2021, August). Designing interface aids to assist collaborative robot operators in attention management. In 2021 30th IEEE International Conference on Robot & Human Interactive Communication (RO-MAN) (pp. 264-271). IEEE.