Collaborative robots in manufacturing have a straightforward promise: pair a human with a robot, let each do what they’re best at. In practice, the hard part isn’t getting the robot to work. It’s figuring out how to take a task that was designed for human hands and rework it into something a human-robot team can actually do together.
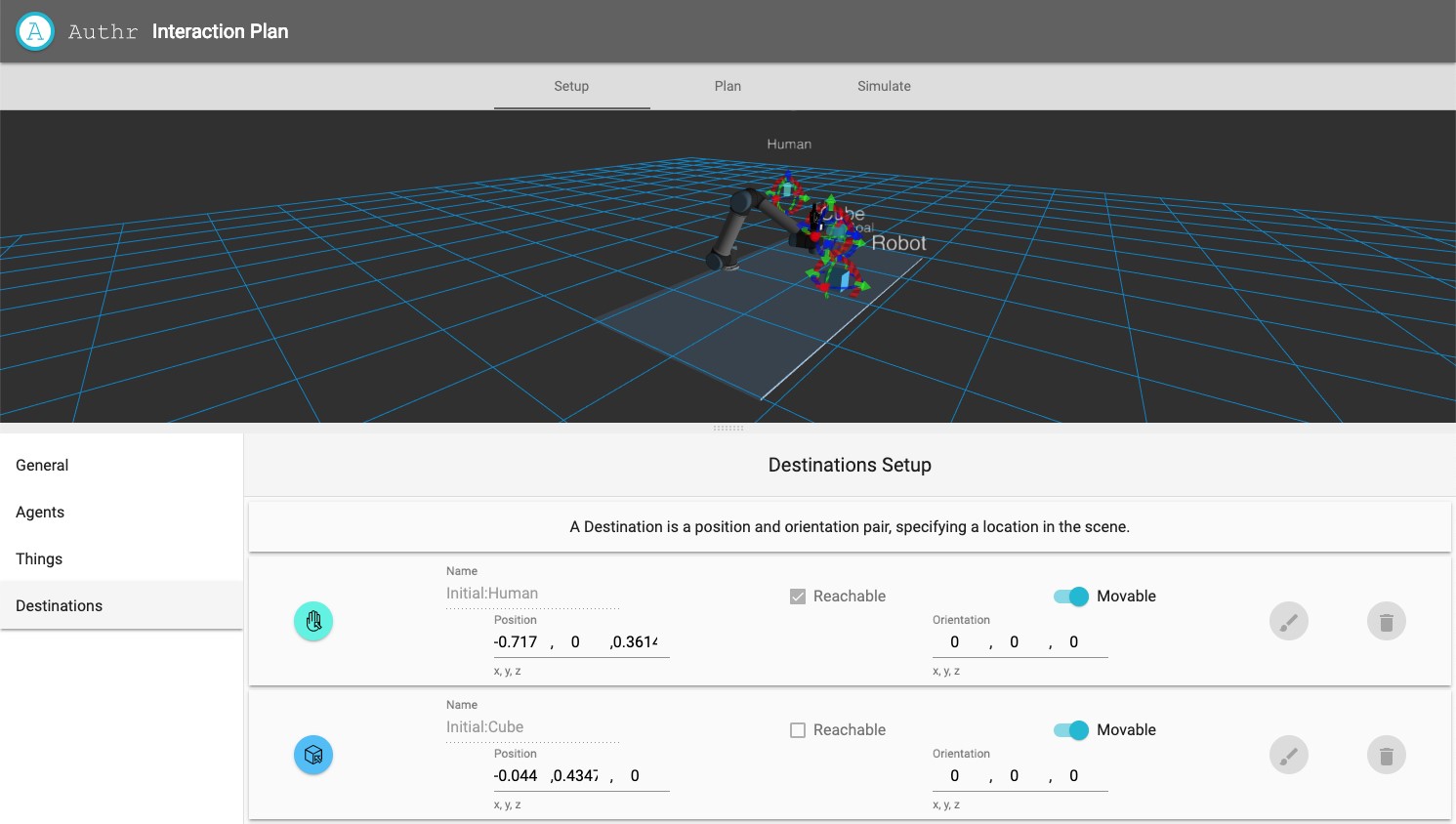
During my time at the People and Robots Laboratory at UW-Madison, we built Authr, a task authoring environment that helps manufacturing engineers do exactly that. Instead of needing robotics expertise, engineers get a visual drag-and-drop interface for breaking manual work down into collaborative plans.
The core idea is to decompose work into plans, tasks, and therbligs (atomic motion primitives from classical industrial engineering), then let Authr handle allocating who does what. Once a plan is laid out, the system simulates the full sequence in a ROS-based environment so engineers can verify everything before touching real hardware. It supports Universal Robots (UR3, UR5, UR10) and the Franka Emika Panda.
We ran two user studies evaluating the tool. Authr proved usable and effective as an authoring interface; the assistive allocation methods meaningfully improved how participants designed complex collaborative plans.
This was joint work with Andrew Schoen, Mathias Strohkirch, and Bilge Mutlu, published at ACM UIST 2020. Source code is on GitHub.
Papers: